Claude Summary of “Design of a Dexterous Gripper with Multimodal Tactile Sensing”, Presented at NEMS 2024
Researchers at MIT’s Biomimetic Robotics Laboratory have developed a groundbreaking robotic gripper that takes a significant step toward matching human hand capabilities. Unlike traditional robotic grippers, this design focuses not just on mimicking human hand kinematics, but on replicating the speed, responsiveness, and tactile intelligence that make human manipulation so remarkable.
Key Innovations
Advanced Finger Design
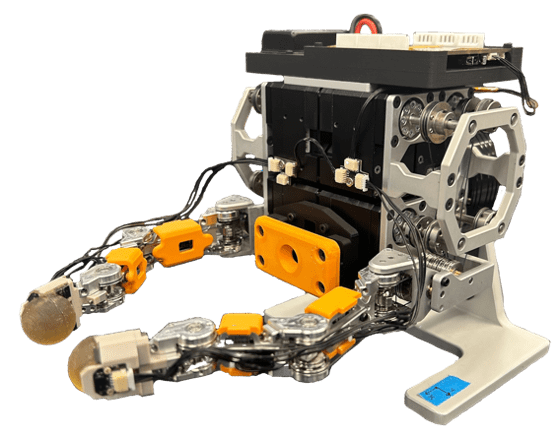
The gripper features two fully actuated fingers, each with four degrees of freedom that closely mirror the human finger’s topology. By using custom 0.5mm tungsten cables and Dynamixel actuators, the researchers created fingers that are:
- Lightweight
- Easily backdrivable
- Capable of active collision avoidance
- Adaptable to various grasping scenarios
Multimodal Tactile Sensing
What truly sets this gripper apart is its sophisticated sensing system. Unlike many robotic hands that rely on high-resolution but slow visual sensors, this design integrates multiple sensing modalities:
- Barometric pressure sensors at fingertips for 3D contact force mapping
- Time-of-flight proximity sensors along finger phalanges
- Custom force-sensitive resistors (FSRs)
- Palm sensors for additional context
These sensors operate at high frequencies (up to 200 Hz), enabling fast, reactive manipulation that more closely mimics human tactile perception.
Performance and Potential
The gripper weighs approximately 1.80 kg and demonstrates impressive versatility. Its unique design allows for:
- Grasping objects of various shapes and sizes
- Performing limited in-hand manipulation
- Potential applications in object recognition
- Promising capabilities for tasks like digging and burrowing
Looking Forward
The researchers see this as more than just a technological showcase. Their long-term goals include developing:
- Reflexive grasping controllers
- Advanced manipulation techniques
- Robotic systems that can more intuitively interact with complex environments
Why This Matters
While robotic hands have long been able to match human hand kinematics, they’ve struggled to replicate the reactive, nuanced manipulation humans perform effortlessly. This design represents a significant step toward closing that gap, potentially revolutionizing robotics in fields ranging from manufacturing to prosthetics.
The MIT team has demonstrated that by focusing on speed, sensing, and adaptability, we can create robotic systems that move beyond rigid, predictable movements toward more dynamic, responsive interactions with the world.
