Claude Summary of Paper “Bi-modal Hemispherical Sensors for Dynamic Locomotion and Manipulation”: LINK
Imagine a robot that can sense touch as precisely and dynamically as a human hand. A team of researchers from MIT’s Biomimetic Robotics Laboratory has taken a significant step toward this goal by developing two innovative hemispherical sensors that can measure contact forces and locations with remarkable accuracy.
The Challenge of Robotic Sensing
Robots have long struggled with understanding their physical environment. While humans intuitively sense forces, pressures, and contact points, robots typically rely on rigid, limited sensing technologies. Traditional force sensors are often:
- Fragile
- Expensive
- Sensitive to inertial noise
- Unable to measure multi-axis forces simultaneously
The MIT research team set out to solve these problems by creating sensors that mimic the sensitivity and versatility of biological touch systems.
Two Innovative Sensor Designs
The researchers developed two complementary hemispherical sensors:
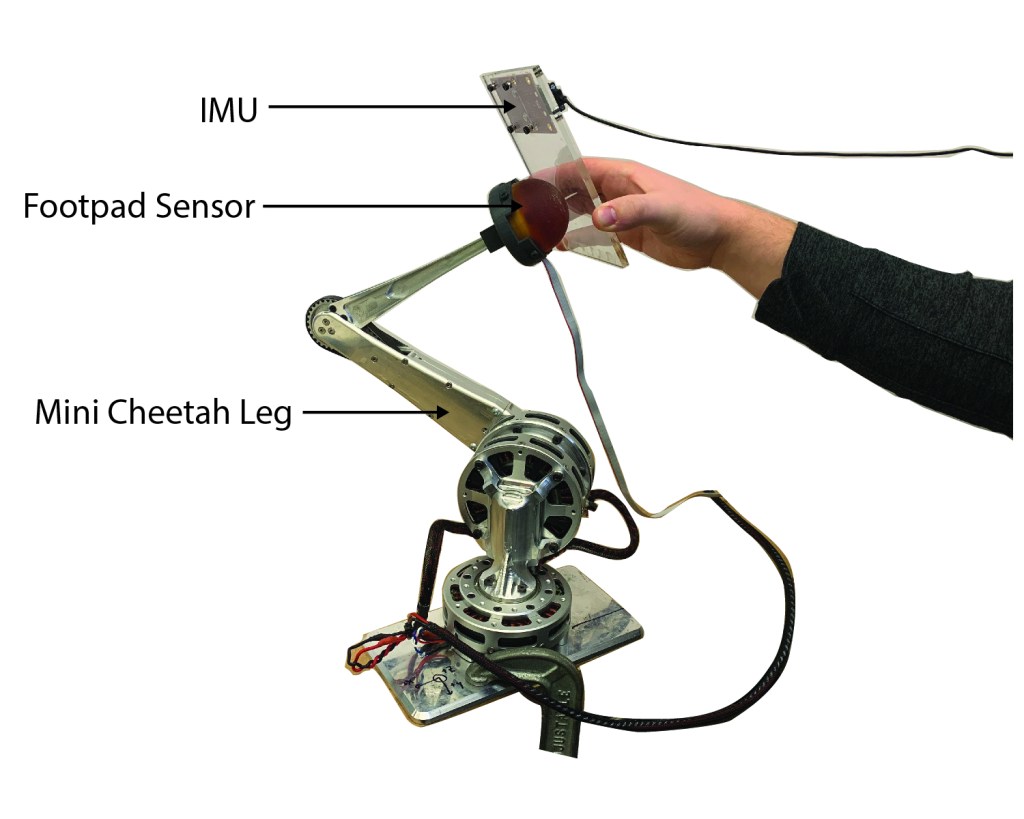
1. Footpad Sensor
- Designed for high-force applications like robotic locomotion
- 56mm in diameter
- Can withstand forces up to 450N
- Sampling rate of 1 kHz
2. Fingertip Sensor
- Optimized for manipulation tasks
- 22mm in diameter
- Measures forces up to 25N
- Sampling rate of 200 Hz
Both sensors use a similar innovative design: pressure sensors embedded within a rubber hemisphere, allowing them to detect forces and contact locations across multiple axes.
The Neural Network Breakthrough
A key innovation was developing an artificial neural network (ANN) estimator that can:
- Process sensor data in real-time
- Accurately estimate forces and contact angles
- Generalize better to unseen data compared to previous methods
Practical Demonstrations
The researchers tested their footpad sensor in two compelling applications:
- Contact Tracking: The sensor enabled a robotic arm to maintain consistent contact with a surface by estimating contact normal vectors.
- Slip Detection and Prevention: By measuring shear and normal forces, the sensor could calculate and prevent potential slippage in real-time.
Why This Matters
These sensors represent a significant advancement in robotic sensing technology. By providing robots with more nuanced touch capabilities, we’re moving closer to:
- More dexterous manipulation
- More stable locomotion
- Better interaction with complex environments
Looking Ahead
The research team plans to:
- Test the footpad sensor on the MIT Cheetah robot
- Integrate the fingertip sensor into robotic grippers
- Further improve sensor fabrication and characterize long-term performance
Conclusion
This research demonstrates how biomimetic design and advanced machine learning can help robots better understand and interact with their physical world. As these technologies continue to evolve, we can expect robots to become increasingly adaptable, responsive, and capable.
