ChatGPT Summary of Paper “Improving Domain Transfer of Robot Dynamics Models with Geometric System Identification and Learned Friction Compensation”: LINK
In the world of robotics, simulation plays a critical role in designing and testing controllers for complex machines. However, transferring these controllers from simulation to real-world systems has long been a challenge, often referred to as the “sim-to-real gap.” This gap arises due to discrepancies between the dynamics of simulated models and their physical counterparts, making real-world performance inconsistent. The MIT Humanoid, a cutting-edge robotic platform, is now at the forefront of tackling this problem with innovative approaches to system identification and dynamics modeling.
The Problem: A Disconnect Between Simulation and Reality
For robots like the MIT Humanoid, which are designed to perform highly dynamic movements, the sim-to-real gap poses a significant challenge. Controllers fine-tuned in simulation often falter when deployed on hardware due to mismatched dynamics, such as differences in friction, inertial parameters, or actuator behavior. Addressing this mismatch is crucial for ensuring seamless transitions between simulation and physical execution.
A Two-Pronged Approach
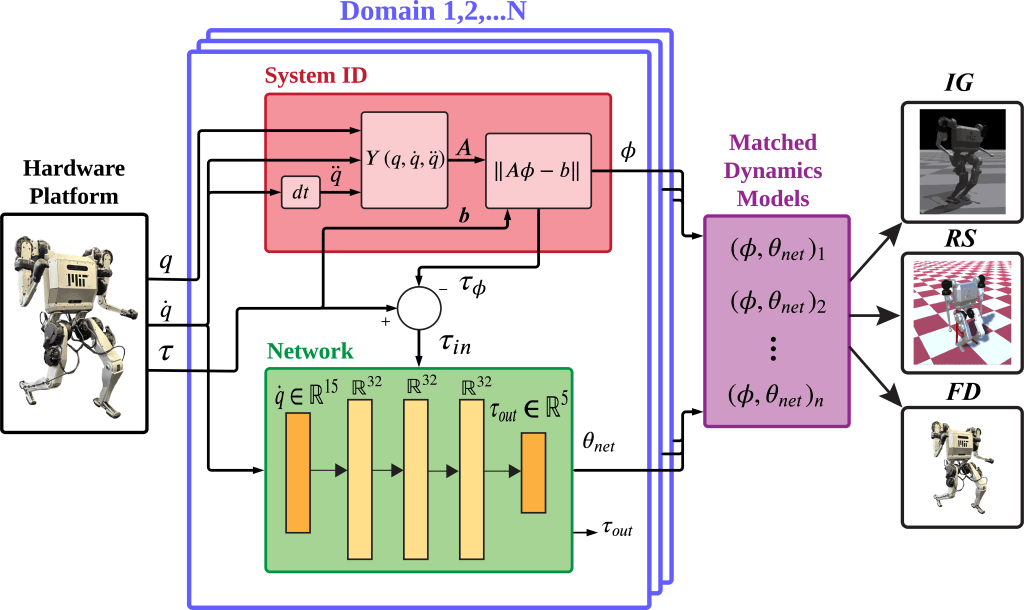
To overcome these challenges, researchers have developed a novel pipeline combining geometric system identification with neural network-based friction compensation. This two-pronged approach not only improves the accuracy of simulation models but also enhances their transferability across different domains, including multiple simulation platforms and the physical robot.
- Geometric System Identification: Using real-world data collected from the MIT Humanoid, researchers optimize the inertial parameters of the robot’s dynamic model. This process ensures that the simulation accurately reflects the physical system’s behavior, accounting for the complexities of high-degree-of-freedom systems. Constraints are applied to guarantee that the parameters remain physically consistent, leading to robust and reliable models.
- Neural Network Friction Compensation: While geometric identification improves the overall model, certain dynamics, such as joint friction and coupled effects, are difficult to capture using traditional methods. To address these residual dynamics, a neural network is trained to estimate frictional torques based on joint velocity histories. This complementary step fine-tunes the model further, resulting in highly accurate torque predictions.
Seamless Domain Transfer
The pipeline was tested across three domains:
- IsaacGym Simulation (IG): A GPU-accelerated physics simulator offering high-speed experimentation.
- RobotSoftware (RS): A custom rigid-body simulator developed in-house.
- Physical Hardware: The MIT Humanoid itself.
Through this pipeline, researchers achieved impressive results in aligning the behavior of controllers across these domains. Optimized models successfully reduced discrepancies in torque predictions, allowing controllers designed in simulation to perform effectively on hardware without extensive re-tuning.
Experimental Success
Experiments showcased the MIT Humanoid’s ability to:
- Accurately Predict Torques: Combining optimized inertial parameters with neural networks significantly reduced errors in torque estimation.
- Match Dynamics Across Domains: Controllers transferred seamlessly between simulation environments and hardware, proving the robustness of the pipeline.
- Improve Real-World Performance: The approach mitigated common issues like stick-slip friction in joints, enhancing the robot’s motion quality.
The Broader Implications
The success of this method goes beyond the MIT Humanoid. By addressing both global model discrepancies and localized dynamics through a hybrid approach, the pipeline sets a precedent for future robotics systems. The ability to transfer controllers across domains with minimal loss in performance is a game-changer for research and development, accelerating innovation in fields ranging from legged locomotion to robotic manipulation.
What’s Next?
While this approach marks a significant step forward, challenges remain. Future work will focus on improving dataset quality, exploring more robust neural network architectures, and validating the pipeline on more complex trajectories, such as those involving ground contact and high-impact tasks. These advancements will further bridge the gap between simulation and reality, unlocking new possibilities for dynamic robotics.
The MIT Humanoid stands as a testament to the power of integrated engineering and machine learning, paving the way for robots that not only move like humans but also adapt like them. With ongoing research and development, the dream of achieving seamless sim-to-real transfer is closer than ever.
