Gemini 2.0 Summary of Paper “Design of a Multimodal Fingertip Sensor for Dynamic Manipulation”: LINK
Robots are getting better at interacting with the world, but their “sense of touch” still lags far behind human capabilities. A new research paper from MIT’s Biomimetic Robotics Laboratory, titled “Design of a Multimodal Fingertip Sensor for Dynamic Manipulation,” introduces a powerful new sensor that could help close this gap. This innovative device isn’t just about feeling – it’s about sensing, reacting, and understanding complex contact interactions at high speeds. Let’s dive into the details of this exciting advance.
The Challenge of Dynamic Robotic Touch
Traditional robotic tactile sensors often fall short when it comes to dynamic manipulation tasks. These sensors can be bulky, slow, and lack the multi-directional sensing capabilities required for fast and robust actions. Humans, on the other hand, have incredibly sensitive fingertips that allow us to grasp, manipulate, and react to objects with remarkable ease. Replicating this capability in robots requires a new approach to sensor design.
Enter the Multimodal Fingertip Sensor
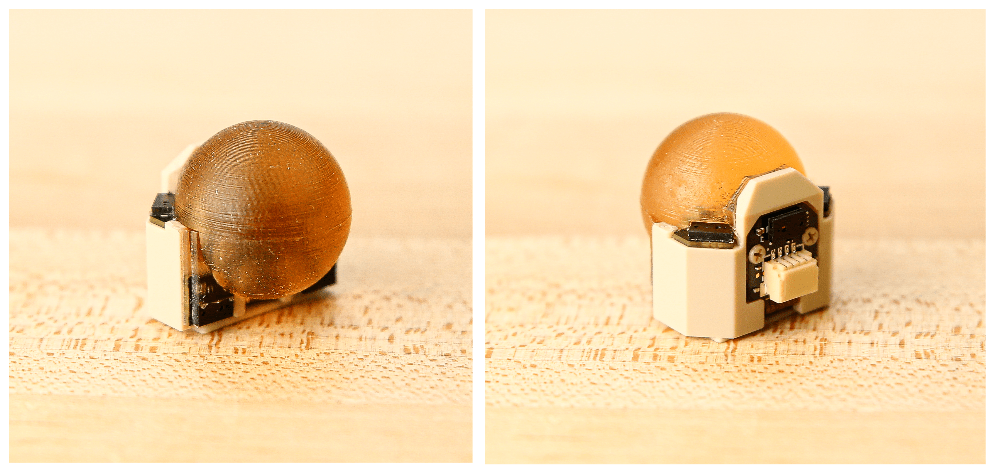
The MIT team’s sensor tackles this challenge head-on with a unique and carefully engineered design. It combines three key sensing modalities into a compact, robust fingertip:
- Barometric Pressure Sensors: Eight BMP384 pressure sensors embedded within a spherical polyurethane rubber dome are used to measure contact forces and location. These sensors have a fast sampling rate (up to 200Hz) which is critical to understanding and reacting to fast and small force changes, as well as the shape of a contact.
- Time-of-Flight Proximity Sensors: Five VL6180X time-of-flight (ToF) sensors are positioned strategically around the rubber dome. These measure distances to nearby objects and surfaces, providing valuable information before physical contact.
- Microcontroller and Data Processing: All of this sensor data flows through a custom PCB with an STM32F334 microcontroller and a CAN transceiver for quick processing and communication with the robot’s control system.
The sensor’s spherical shape expands the sensing range compared to their previous design, allowing it to perceive contacts across a 180° area.
A New Metric: The Collision Impulse Ratio
To quantify the sensor’s ability to minimize the effects of latency during dynamic interactions, the researchers developed a novel metric called the collision impulse ratio. This metric takes into account not just the sensor’s latency, but also the effects of that latency on the overall impulse force generated during a collision. By minimizing this ratio, they can develop sensors that both detect collisions quickly and help to avoid the negative effects of those collisions.
Their analysis shows that system latency is much more critical for collision impulse than other parameters like initial velocity, and that the single most important thing for improving dynamic reaction is minimizing latency, as opposed to increasing stiffness.
Experimental Results and Demonstrations
The paper details a series of experimental results that demonstrate the sensor’s capabilities. These tests include:
- Latency Measurement: The sensors achieve an end-to-end contact force latency of 7ms and proximity latency of 4ms, due to a variety of clever engineering choices.
- Contact Transition Measurement: The sensor can quickly transition between proximity sensing and force/location sensing, ensuring that the data is accurate during contact.
- Coarse Mapping: By sweeping the sensor in free space, the time-of-flight sensors can be used to generate a coarse map of the environment, which can reduce uncertainty for future interactions.
- Dynamic Reaction Behaviors: The low latency of the sensor is crucial for a number of dynamic behaviors like stable contact following (where the sensor sticks to a surface) and potential field based collision avoidance (where the sensor creates a “force field” around itself).
Why This Matters
This research has significant implications for the future of robotic manipulation:
- Low-Latency Feedback: The sensor’s design minimizes latency, which is crucial for fast and reactive robotics. The combination of the pressure sensors, time-of-flight sensors, and microcontroller leads to a system that is both compact and responsive.
- Multimodal Data: Combining proximity and force sensing unlocks new possibilities for robust manipulation, such as collision avoidance and pre-shaping grips before making contact.
- Improved Object Handling: The sensor’s ability to measure contact forces, locations, and proximity simultaneously makes it well-suited for handling complex objects and tasks.
- Fast Dynamic Reactions: The low latency allows the sensor to be used to create fast, human-like dynamic behaviors using just feedforward control.
- New Metric for Comparison: The use of the collision impulse ratio metric allows for a standardized way to measure performance during contact scenarios.
Future Directions
The researchers are already planning future improvements to the sensor, including:
- Higher Sampling Rates: Pushing the sampling rates even higher would further reduce latency and enable finer control.
- Improved Casting Processes: Better casting will further improve the sensors’ accuracy and force resolution.
- Generalizable Models: Instead of training unique models for each sensor, the researchers intend to generalize their models, further reducing the overhead required for each sensor unit.
Key Takeaways:
- The multimodal fingertip sensor combines barometric pressure, time-of-flight proximity, and onboard microcontrollers for a highly capable sensing system.
- The collision impulse ratio provides a powerful metric for evaluating the system’s ability to mitigate collisions and minimize system latency
- The sensor’s low latency and multi-directional sensing capabilities open new possibilities for dynamic robotic manipulation.
This work represents a significant leap forward in the development of advanced robotic touch. By combining these sensing modalities and prioritizing low latency, the MIT team has created a powerful sensor that has a lot of promise for making robots faster, safer, and more dexterous in a variety of real-world applications.
