Gemini 2.0 Summary of Paper “Fast Reflexive Grasping With a Proprioceptive Teleoperation Platform”: LINK
Have you ever seen a robotic arm moving with surprising speed and dexterity, almost like a human hand? Well, engineers are working hard to make this a reality, and a recent paper from MIT’s Biomimetic Robotics Laboratory offers a glimpse into the future of robotic manipulation. Their research focuses on a novel teleoperation system that uses “reflexes” to give robotic arms the kind of fast and reliable grasping abilities we take for granted in our own hands.
The Challenge of Robotic Grasping
Teleoperation, where a human controls a robot remotely, sounds simple, but it can be surprisingly tricky. Traditional robotic arms are often too slow and unresponsive compared to our own hands, making tasks like pick-and-place difficult and clumsy. To solve this, researchers are exploring proprioceptive actuation, a way to design robot arms that have a more direct and natural connection between movement and force. This allows a human operator to feel the forces exerted by the robot and provides more immediate feedback for fine motor control.
Introducing the Proprioceptive Teleoperation Platform
The MIT team designed a cutting-edge teleoperation system that takes proprioceptive actuation to a new level. It features two highly transparent robot arms (one for the user, and one that mimics the user’s actions), along with specially designed grippers on the end of each arm that have something pretty special: bimodal force sensors. These sensors are like highly sensitive digital fingertips, allowing the robot to sense both the force of contact and where the object is touching.
Reflexes Make Robots Smarter
Here’s where things get really interesting. Instead of relying solely on the human operator’s constant guidance, the robot is equipped with two autonomous reflexes:
- Anti-Slip Reflex: If the gripper begins to lose its hold on an object, this reflex automatically increases the grasping force, preventing it from slipping out of grasp.
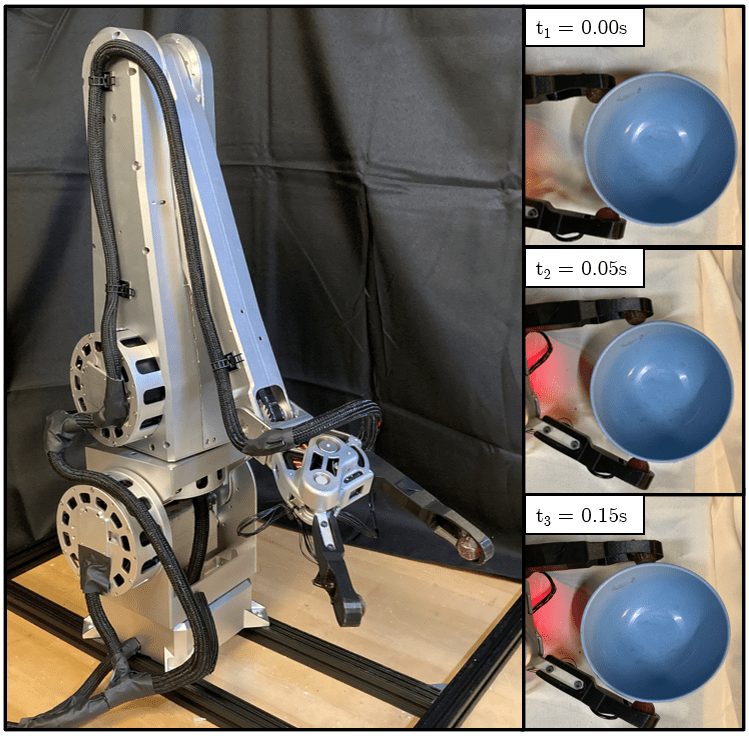
- Re-Grasping Reflex: If the initial grasp isn’t ideal, the re-grasping reflex rapidly adjusts the position of the fingers, aligning them with the best points on the object for maximum grip stability, making a new grasp within 150 milliseconds!
How It All Works
The reflexes work in tandem with the teleoperation system. The user provides the general commands for grasping, and the sensors trigger the reflexes whenever there’s a slip or a poor grip. The user doesn’t have to micro-manage the grasp, but rather can take full advantage of the natural and direct feedback of the proprioceptive design.
The system uses the bimodal sensors on the gripper fingers to measure forces and contact points and uses a neural network for interpretation, so that the robot can understand how it has grabbed an object. For instance, the re-grasping reflex utilizes the contact information to compute the center of the object and then moves the fingers to grip on the opposite sides. This entire process happens automatically in milliseconds.
The Results
The researchers ran experiments to test the effectiveness of their design, with some impressive results:
- Faster Grasping: The combination of a proprioceptive arm design and the reflexes enabled the system to complete pick-and-place tasks much faster than without these features.
- Improved Grasp Reliability: The reflexes meant fewer failed grasp attempts, even when the initial contact wasn’t ideal.
- Novice Operators Benefit: The system made it easier for people with little prior experience to teleoperate the robot successfully.
What’s Next?
This work represents a significant step towards more intuitive and high-performance teleoperation systems. The researchers are aiming to further improve their algorithms and broaden the application to a wider variety of shapes of objects to grasp. In the future, it’s easy to imagine robots with similar reflexes being used in remote surgery, hazardous material handling, or in industrial automation to increase productivity and precision.
The idea that robots can use reflexes to improve their performance is truly inspiring. Who knows, perhaps soon we’ll see robots with hands as nimble and reliable as our own!
Key Takeaways:
- Proprioceptive actuation leads to a more direct link between robotic movement and human feel.
- Bimodal force sensors allow the robot to sense both the force and location of contact.
- Reflexive grasping algorithms boost the speed and robustness of robotic grasping.
- The teleoperation system is faster, more reliable, and easier for less experienced operators to use, especially when compared with other systems.
